After the boards had been lying around unassembled for a year, it was time to solder the components and run a simple program as a test.
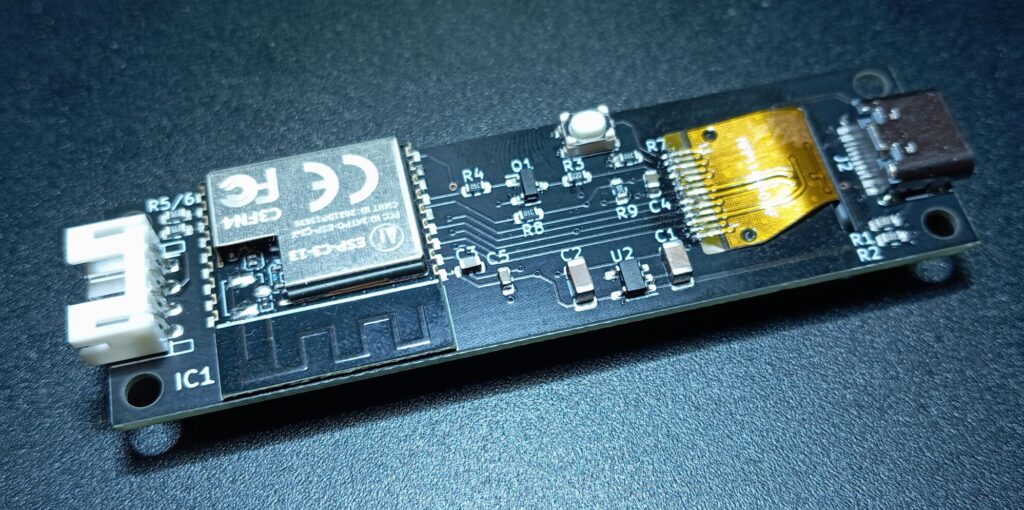
The components on the underside could be quickly soldered with a hotplate. Only the flat flex cable and the 2 mm plug for connecting the LEDs had to be soldered by hand.

All that remains is to solder the small 5-way joystick to the top of the board and we’re done. The board can be fitted with a 0.96 inch IPS display with 80×160 pixels or a 1.14 inch display with 135×240 pixels. An ST7789 is used as the controller. For the first test, however, we will not control the display.
#include "FastLED.h"
#define NUM_LEDS 50 // Enter the total number of LEDs on the strip
#define PIN 21 // The pin connected to Din to control the LEDs
CRGB leds[NUM_LEDS];
void setup() {
FastLED.addLeds<WS2812, PIN, RGB>(leds, NUM_LEDS).setCorrection(TypicalLEDStrip);
FastLED.setMaxPowerInVoltsAndMilliamps(5, 1500); // Set power limit of LED strip to 5V, 1500mA
FastLED.clear(); // Initialize all LEDs to "off"
}
void loop() {
rainbowCycle(20);
}
void rainbowCycle(int DelayDuration) {
byte *c;
uint16_t i, j;
for(j=0; j < 256; j++) {
for(i=0; i < NUM_LEDS; i++) {
c = Wheel(((i * 256 / NUM_LEDS) + j) & 255);
leds[NUM_LEDS - 1 - i].setRGB(*c, *(c+1), *(c+2));
}
FastLED.show();
delay(DelayDuration);
}
}
byte *Wheel(byte WheelPosition) {
static byte c[3];
if(WheelPosition < 85) {
c[0] = WheelPosition * 3;
c[1] = 255 - WheelPosition * 3;
c[2] = 0;
}
else if(WheelPosition < 170) {
WheelPosition -= 85;
c[0] = 255 - WheelPosition * 3;
c[1] = 0;
c[2] = WheelPosition * 3;
}
else {
WheelPosition -= 170;
c[0] = 0;
c[1] = WheelPosition * 3;
c[2] = 255 - WheelPosition * 3;
}
return c;
}
The board can be programmed and supplied with power directly via USB. The example program above uses the FastLED library to create a rainbow that runs through the LEDs.
Leave a Reply